Visual Implicit Geometry Transformer for Autonomous Driving
Abstract
We introduce the Visual Implicit Geometry Transformer (ViGT), an autonomous driving geometric model that estimates continuous 3D occupancy fields from surround-view camera rigs. ViGT represents a step towards foundational geometric models for autonomous driving, prioritizing scalability, architectural simplicity, and generalization across diverse sensor configurations. Our approach achieves this through a calibration-free architecture, enabling a single model to adapt to different sensor setups. Unlike general-purpose geometric foundational models that focus on pixel-aligned predictions, ViGT estimates a continuous 3D occupancy field in a bird's-eye-view (BEV) addressing domain-specific requirements. ViGT naturally infers geometry from multiple camera views into a single metric coordinate frame, providing a common representation for multiple geometric tasks. Unlike most existing occupancy models, we adopt a self-supervised training procedure that leverages synchronized image-LiDAR pairs, eliminating the need for costly manual annotations. We validate the scalability and generalizability of our approach by training our model on a mixture of five large-scale autonomous driving datasets (NuScenes, Waymo, NuPlan, ONCE, and Argoverse) and achieving state-of-the-art performance on the pointmap estimation task, with the best average rank across all evaluated baselines. We further evaluate ViGT on the Occ3D-nuScenes benchmark, where ViGT achieves comparable performance with supervised methods.
Method
Our architecture consists of three main components: (1) an image encoder (ViT-L) that independently processes each image and extracts feature tokens from the last four layers, producing four sequences of tokens per image; (2) a calibration-free Implicit BEV Projection module that projects tokens from each encoder layer across all images to their corresponding BEV space, generating four layer-specific BEV representations, which are then aggregated and upsampled into a single unified BEV representation using DPT; and (3) a query-based Implicit Decoder that predicts occupancy probabilities for 3D points from the final BEV features. This design enables pure data-driven scene modeling without geometric inductive biases.
Visualizations
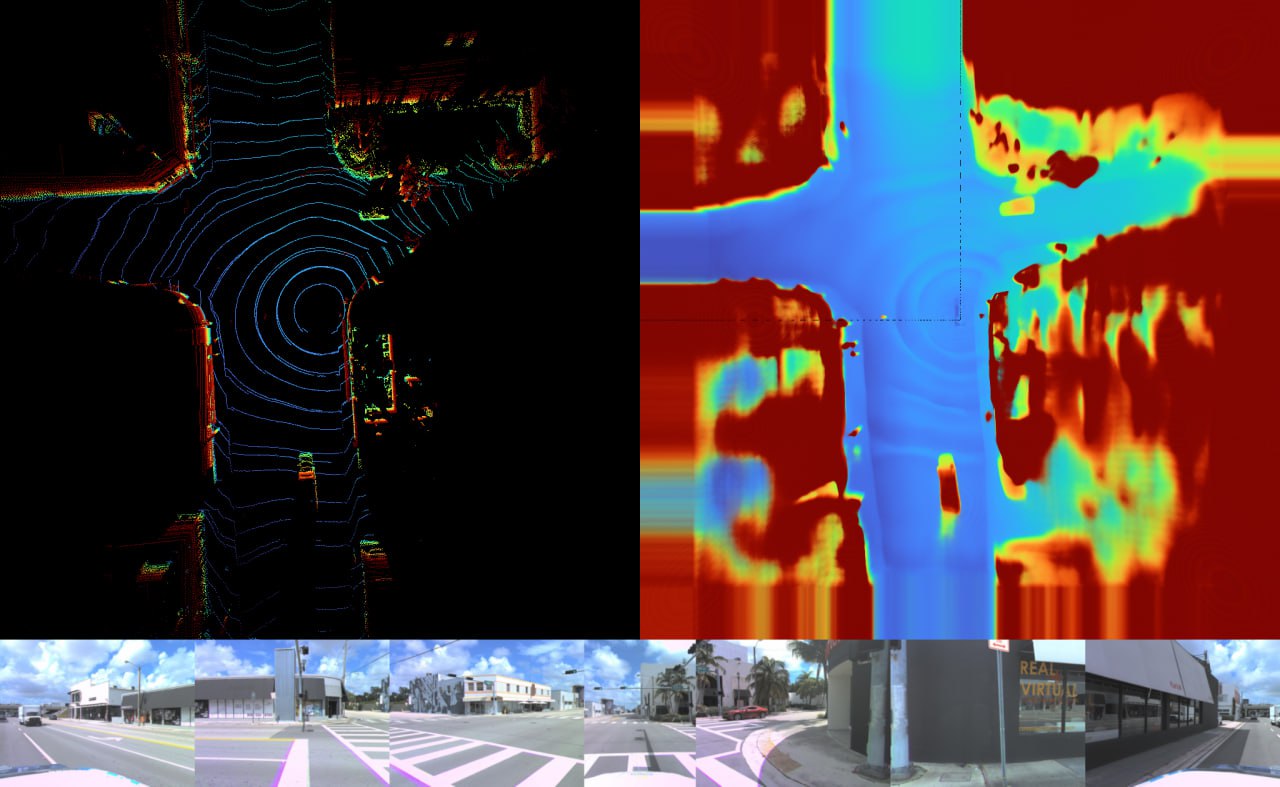
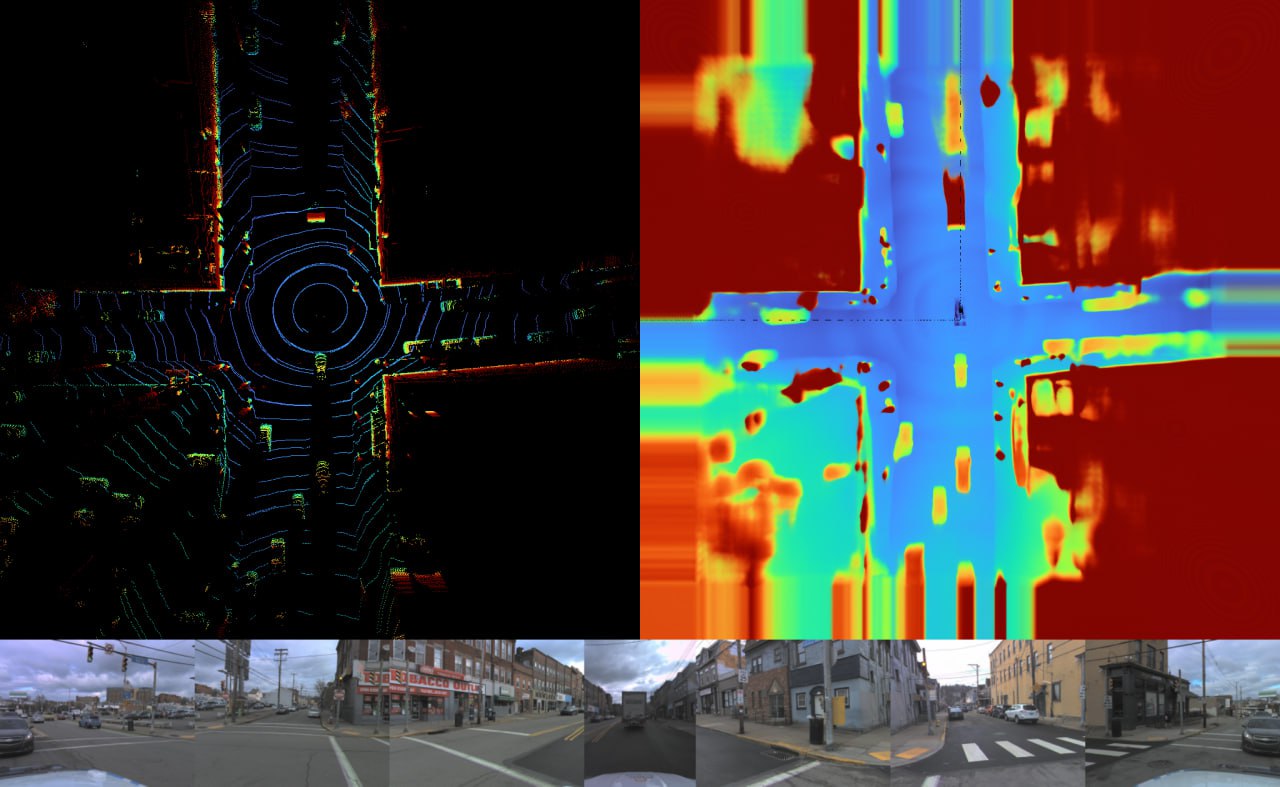
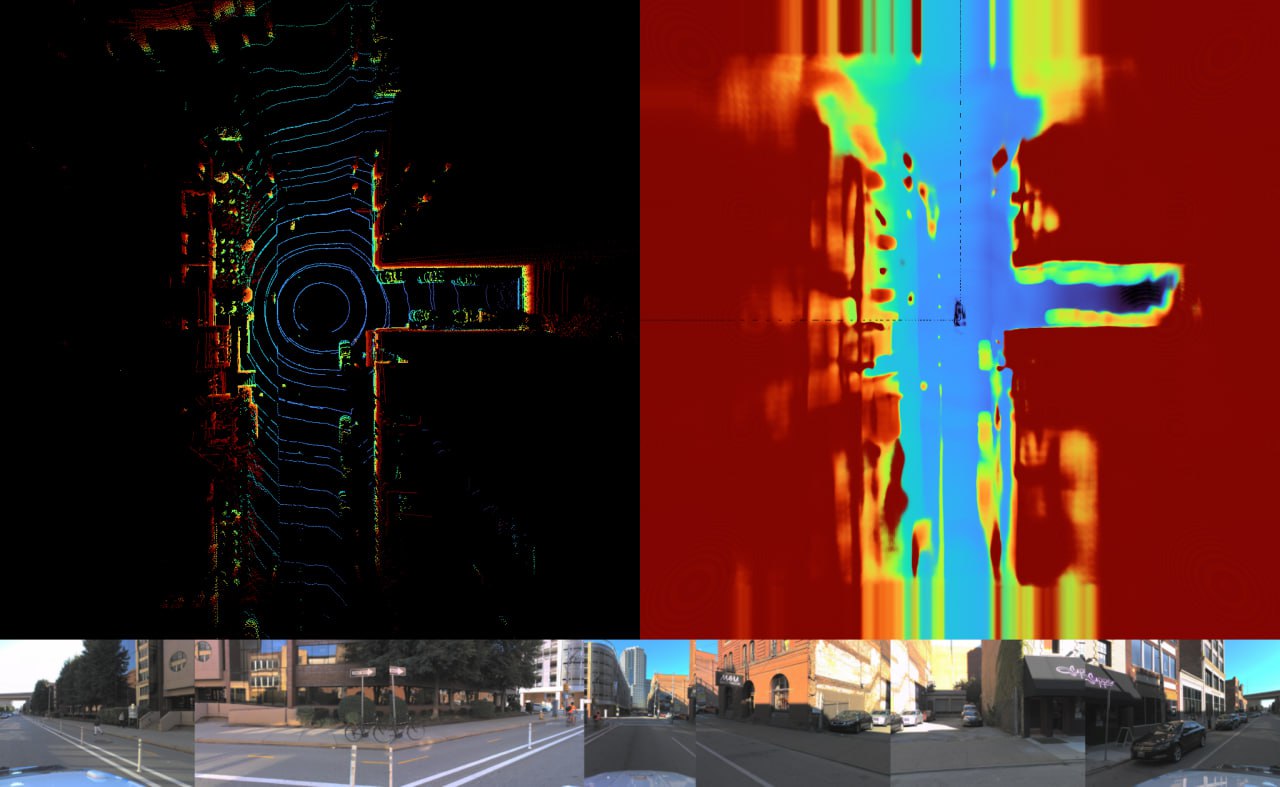
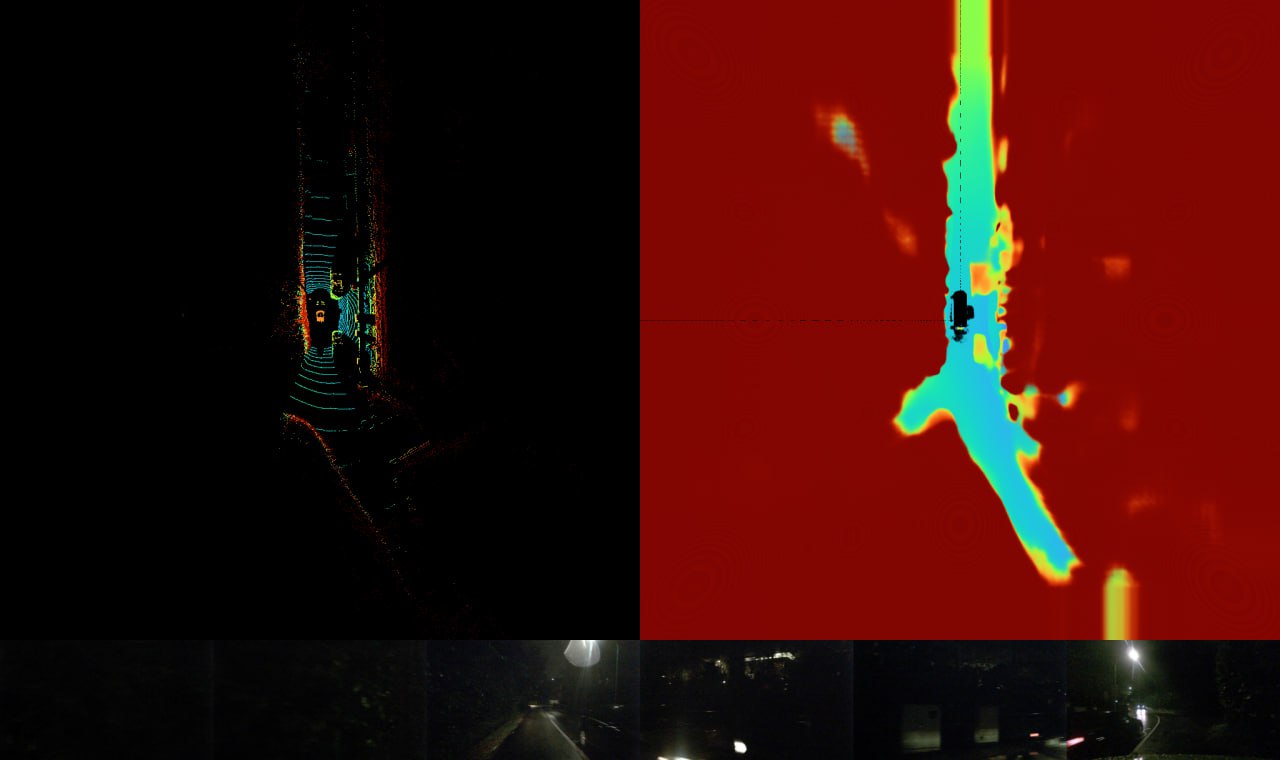
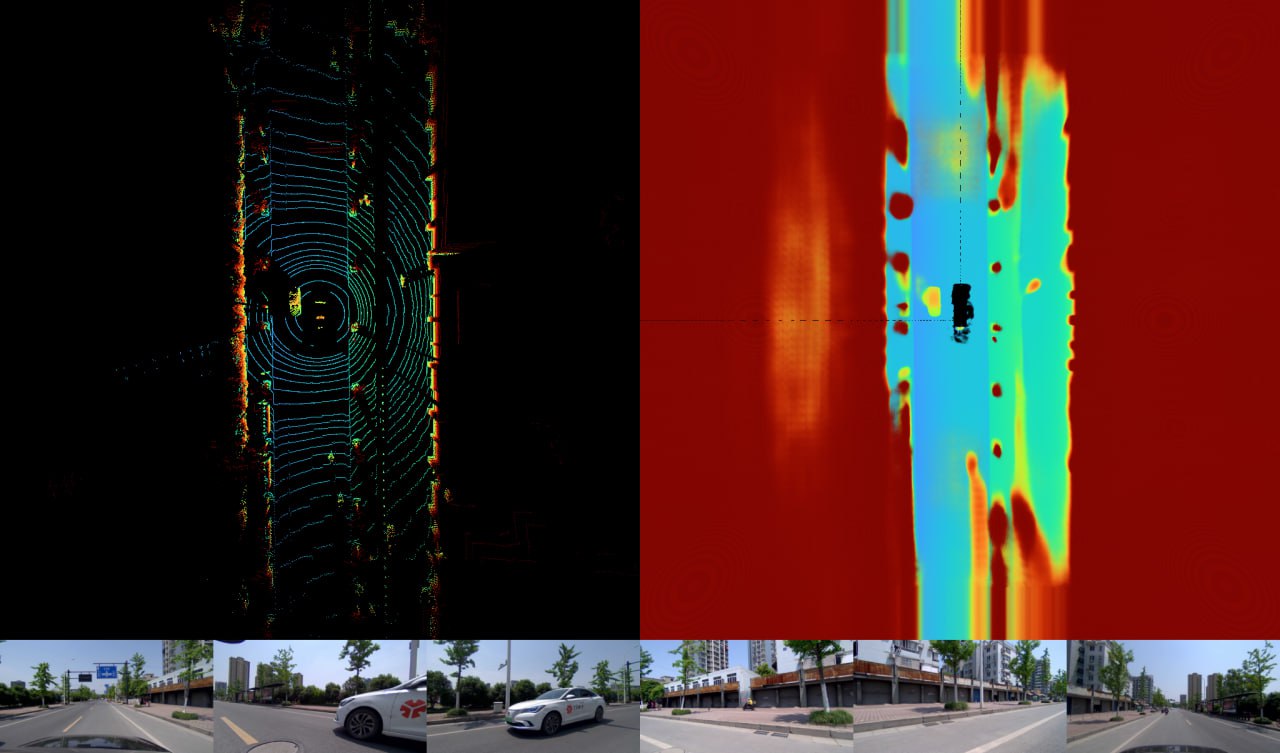
The videos and images below follow the same layout: the bottom strip shows camera images used as model input, the right panel shows estimated occupancy, and the left panel shows the LiDAR point cloud for reference.
Videos
Illustrations
BibTeX
@article{vigt2026,
title = {Visual Implicit Geometry Transformer for Autonomous Driving},
author = {Arsenii Shirokov, Mikhail Kuznetsov, Danila Stepochkin, Egor Evdokimov, Daniil Glazkov, Nikolay Patakin, Anton Konushin, Dmitry Senushkin},
journal = {arXiv preprint arXiv:2602.05573},
year = {2026}
}